 ORIGAMI SIMULATOR
ORIGAMI SIMULATOR
 WEBGL SHADERS
WEBGL SHADERS
 SHELL FORM FINDING
SHELL FORM FINDING
 STRUCTURAL SIMULATIONS
STRUCTURAL SIMULATIONS
Anisotropic Modeling of Electro-mechanical Brick Assemblies (AMOEBA), is a 3D CAD and simulation tool for modular robotics. In this tool, users construct assemblies of functional bricks and simulate their electronic and mechanical behaviors. AMOEBA primarily serves as a research tool for quickly simulating assemblies of "digital material" parts that we are developing at CBA. While building this tool I was also thinking about how to package structural analysis in a form that would be appealing and accessible to novice users - where models could be built and meaningfully simulated in a matter of minutes with no prior experience.
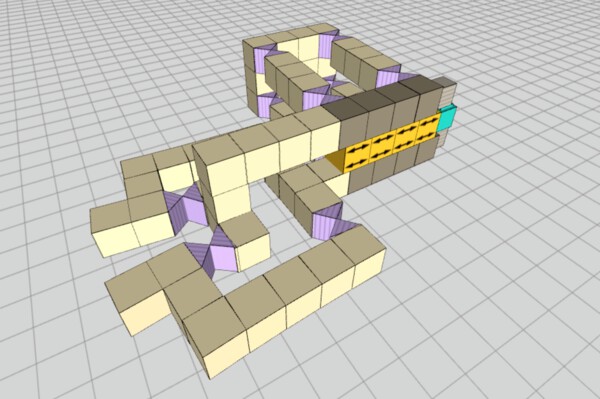
Simulation of a gripper mechanism made from structural bricks, 1 DOF bending flexures, and shear actuators.
An offshoot of this work is a collaboration with E-Line Media on a game exploring an aspirational future where digital materials are used to construct nearly everything. In the game, players construct assemblies from functional blocks in an open-ended sandbox environment and in more directed challenges. We envision a large component of gameplay revolves around constructing robots, operating them, and using them to shape the surrounding environment.
The game will extend concepts from AMOEBA through realtime user interaction. For example, actuators in the game can be mapped to the keyboard and other gaming controllers so players can operate their robots live. Using these controls, players test the agility and speed of their robot in arena challenges, drawing inspiration from the competitions of FIRST Robotics.
Demo of an early version of AMOEBA showing the design and simulation workflow (this version doesn't contain any of the anisotropic flexures of my later version). This work is documented in my Master's Thesis and in the paper Hierarchical Assembly of a Self-Replicating Spacecraft (IEEE Aerospace).
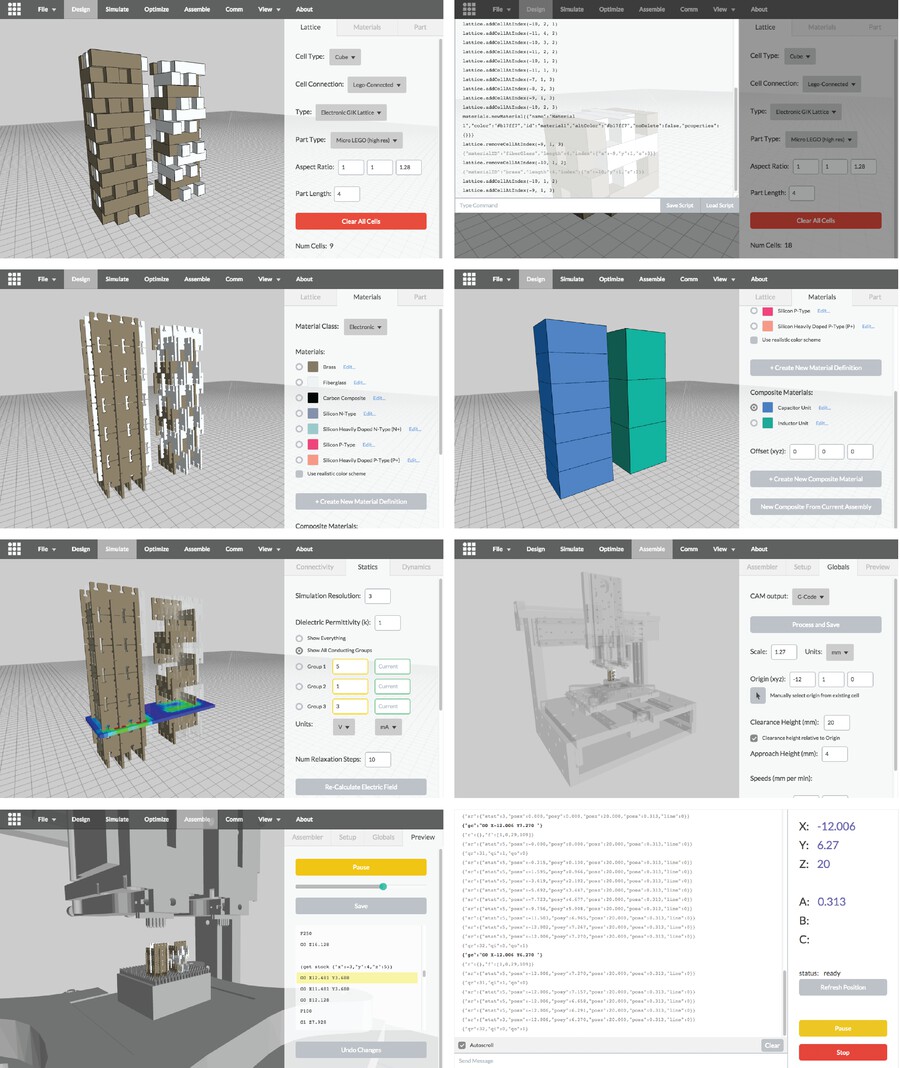
Demo of an even earlier version of AMOEBA, where electronic elements could be placed, simulated, and then toolpathed for automated assembly. The app connects directly to the machine through a serial interface (via nodejs) to send out G-Code motion commands. This work is documented in the paper Automated Assembly of Digital Materials (Proceedings of the 2016 Manufacturing Science and Engineering Conference).
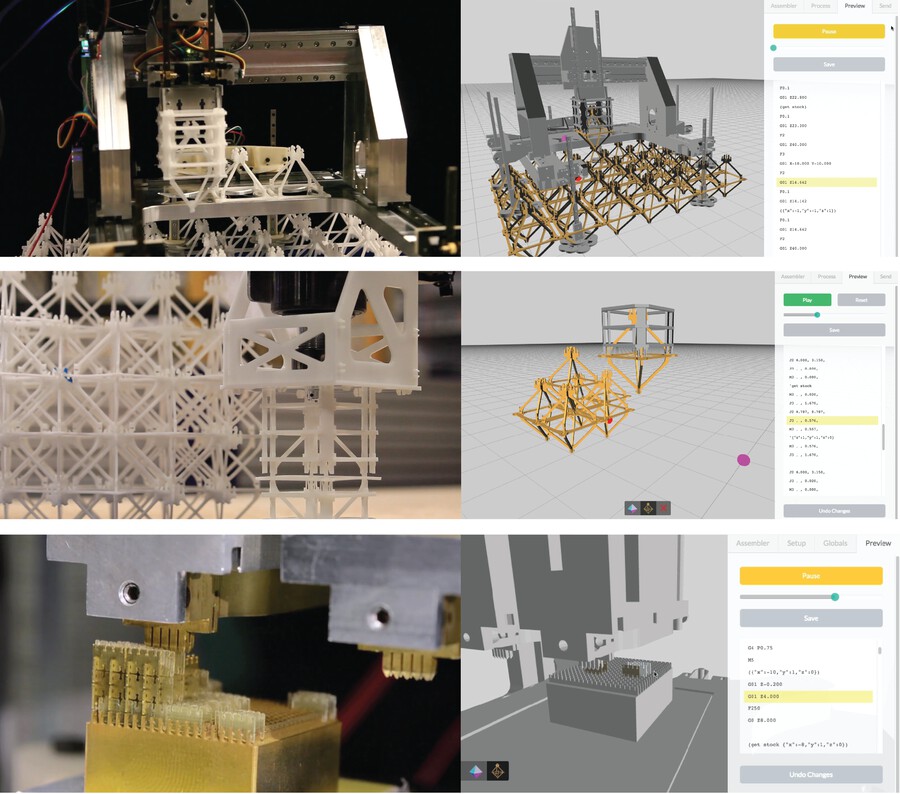
An early version of AMOEBA with three of the machines that it communicates with to control assembly processes.
Another exploration into using this tool to design nano structures from DNA bricks.