STRUCTURAL SIMULATIONS
STRUCTURAL SIMULATIONS
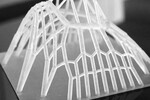 SHELL FORM FINDING
SHELL FORM FINDING
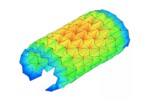 ORIGAMI SIMULATOR
ORIGAMI SIMULATOR
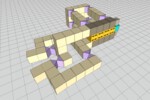 AMOEBA
AMOEBA
Inspired by the work of Theo Jansen, I designed a mechanical leg system and implemented it in a large kinetic sculpture. I modeled and optimized the geometry of the linkage in Mathematica to achieve a combination of efficiency, stability, and step height. The structure is made predominantly from PVC pipe and zip ties. The video below demonstrates the movement of the structure while flipped on its "back" with its "feet" in the air, unfortunately I wasn't able to capture any footage of it right side up before it destroyed itself under its own weight. Find more information about the design process, Mathematica code, and analysis in my undergrad Thesis.
I'm still thinking about linkage design as it pertains to locomotion and digital fabrication. A few years after this initial attempt, I wrote a web app that put these types of linkages in a physics engine and raced them against each other. Find that work here.

An illustration of how my linkage translates rotational motion into stepping motion. I'm not sure who this animation was made by, but it and some other nice analyses of my mechanism can be found on Wikipedia.