MECHANICAL WALKING MACHINE
MECHANICAL WALKING MACHINE
 ORRERY
ORRERY
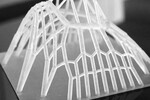 SHELL FORM FINDING
SHELL FORM FINDING
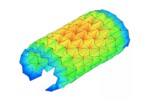 ORIGAMI SIMULATOR
ORIGAMI SIMULATOR
This is a project I've been working on in my spare time for several years, but I hope to finish at some point. It centers around a gimbal mechanism I designed that continuously rotates a disk along any arbitrary path in 3D rotational space. The mechanism is driven by via four stationary motors that are controlled by a microcontroller in response to several sensor inputs. The rotational motion is possible through a series of differential gears, with one differential mounted inside the other differential. This type of mechanism is broadly classified as a type of gimbal.
Currently, I’ve designed an initial prototype of the mechanism in Inventor and Solidworks, and 3D printed it on an Objet printer. I'm still working through several revisions of the electronics and mechanical design, but eventually I will make the mechanism from brass or bronze.
This video shows an early prototype of the gimbal mechanism rotating around its primary, secondary, and tertiary axes simultaneously - driven by four motors mounted outside the frame of the video.
I'm experimenting with techniques to fabricate this mechanism from brass. This is a part I milled from brass on a CNC and bonded with brass rod using a process called brazing. I'd also like to try to fabricate some parts with a combination of CNC and lost wax casting.



Inner differential gear assembly.



Along with the mechanical system, this project involves a significant amount of electronics. These are a series of PCB revisions I've been working through to get to my final board layout. The electronics include several networked XMega microcontrollers, sensors, a user interface, and four DC motors with encoders. I milled the PCBs pictured on a small CNC from copper-clad PCB stock.